BarrettHand™ BH8-282 Technical Specifications
Kinematics
Total fingers: 3 Fingers which spread: 2 Joints per finger: 2 Motors per finger: 1 Axes of palm spread motion: 2 Motors for palm spread motion: 1 Total hand axes: 8 Total hand motors: 4
Range of Motion
Finger base joint: 140° Fingertip: 45° Finger spread: 180°
Finger Speed
Finger fully open to fully closed:1.0 sec Full 180° finger spread: 0.5 sec
Position Sensing
Type: optical incremental encoder Resolution: 0.008° at the finger base joint 17,500 encoder counts full finger open to full close
Weight
978 g (2.15 lb)
Optional Arm Adapter B0133: 0.2 kg (0.4 lb) additional
Payload
6.0 kg (13.2 lbs), 2.0 kg (4.4 lb) per finger
Finger Forces (at tip)
Active: 15 N (3.3 lb) Passive: 20 N (4.4 lb)
Motor Type
Rare-Earth , brushless, DC, servo motors
Mechanisms
Worm drives integrated with patented cable drive and breakaway clutch
Cycles per Month
10,000
Power Requirements
AC electrical outlet
Load: 440 W
Phases: Single
Voltage: 120/240 VAC (85-264 Vrms)
Frequency: 50/60 Hz (47-63 Hz)
Power Supply
Location: dry, stationary surface
Size H,W,D:
295 x 145 x 40 mm
(11.8 x 5.7 x 1.7 in)
Weight : 1.3 kg (3.4 lb)
Single Cable to Hand
3m continuous-flex cable, 8mm diameter
Hand Dimensions, BH8-282
http://web.barrett.com/supportFiles/wikiFiles/Dimensions_282.png
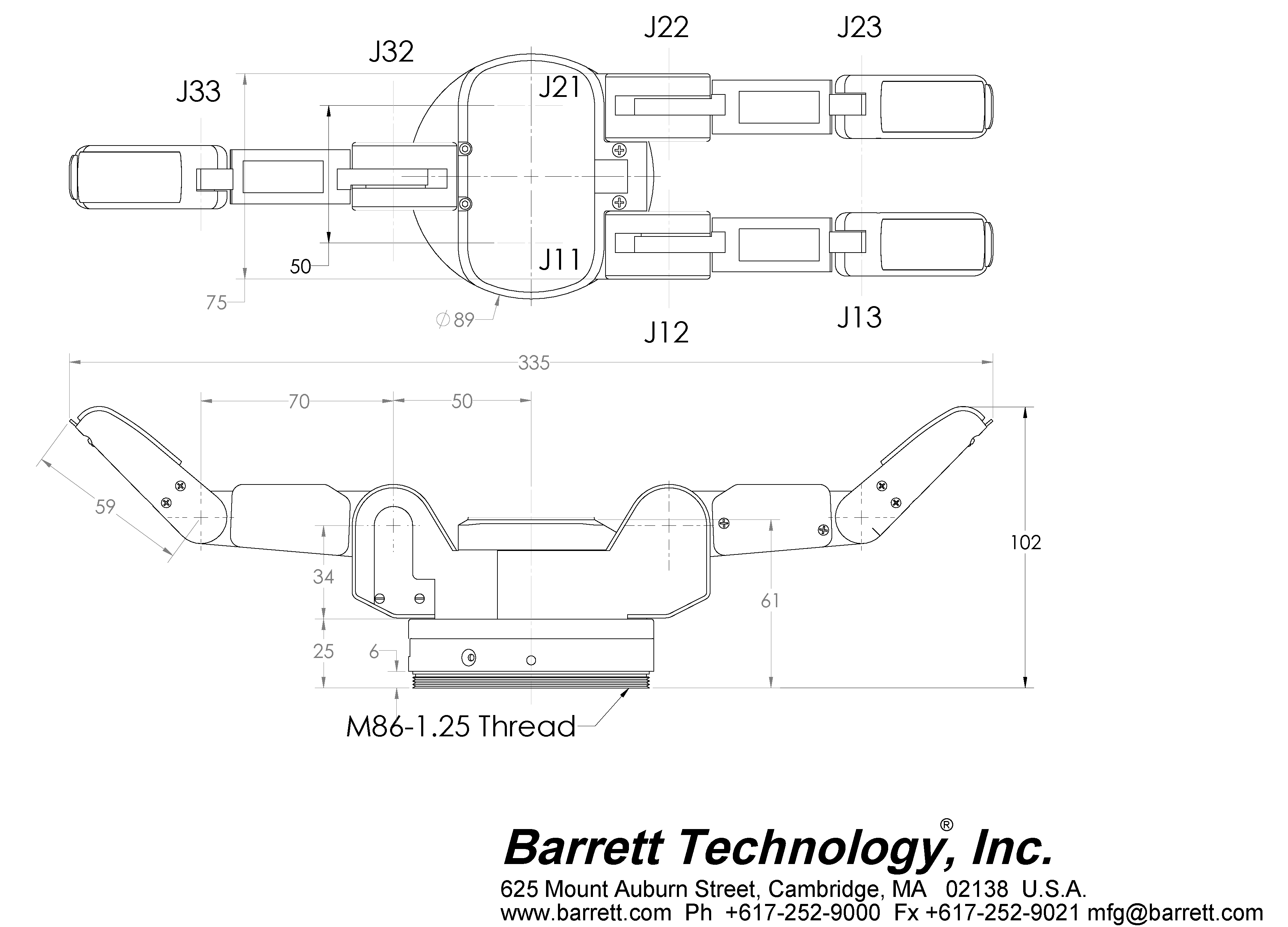{kind=link}
Available Options
- B029A Strain gage Fingertip Torque Sensors for all three fingers
- B0111 C++ Function Library
- B01C3 Subscription Service
US Patents (patents established and pending in other countries)
- 5,501,498
- 5,388,480
- 4,957,320